PORTFOLIO

MES PROJETS UNIVERSITAIRES
Projet Testeur de batterie:
Le premier projet sur lequel j’ai pu travailler était un testeur de batterie de voiture. Le but de ce projet était de créer un circuit qui se connectait directement à la batterie et affichait à l’aide de LED la qualité de la batterie.
Découpage fonctionnel du testeur de batterie:
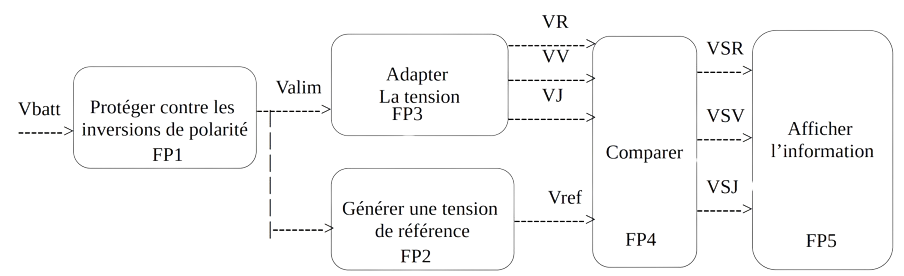
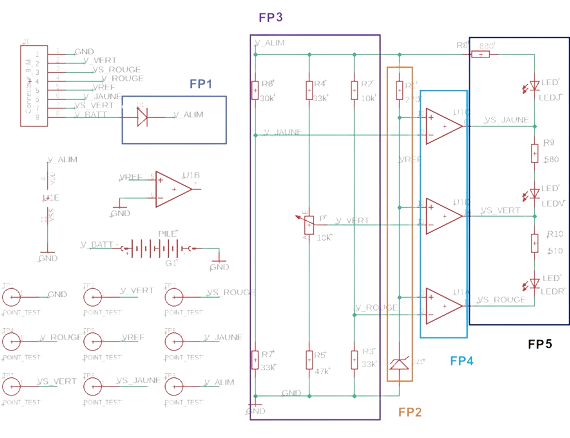
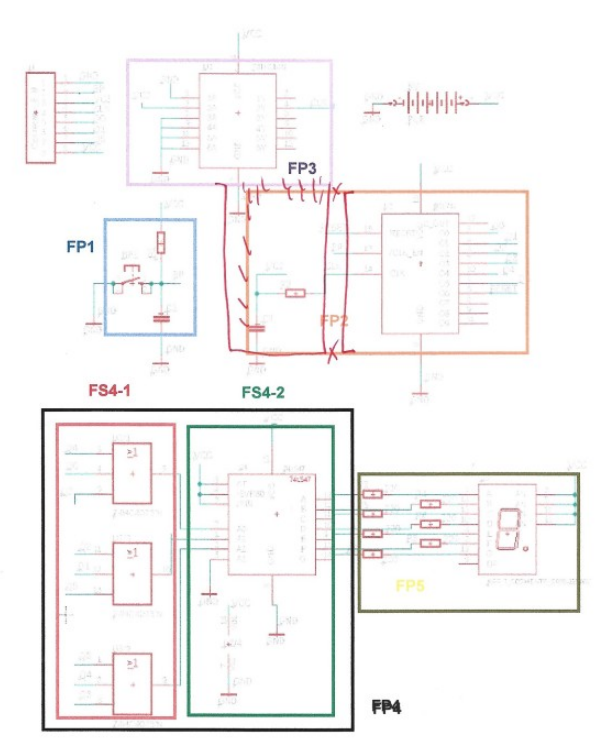
Schéma fonctionnel du testeur de batterie:
Exemple fiche de mesure du testeur de batterie
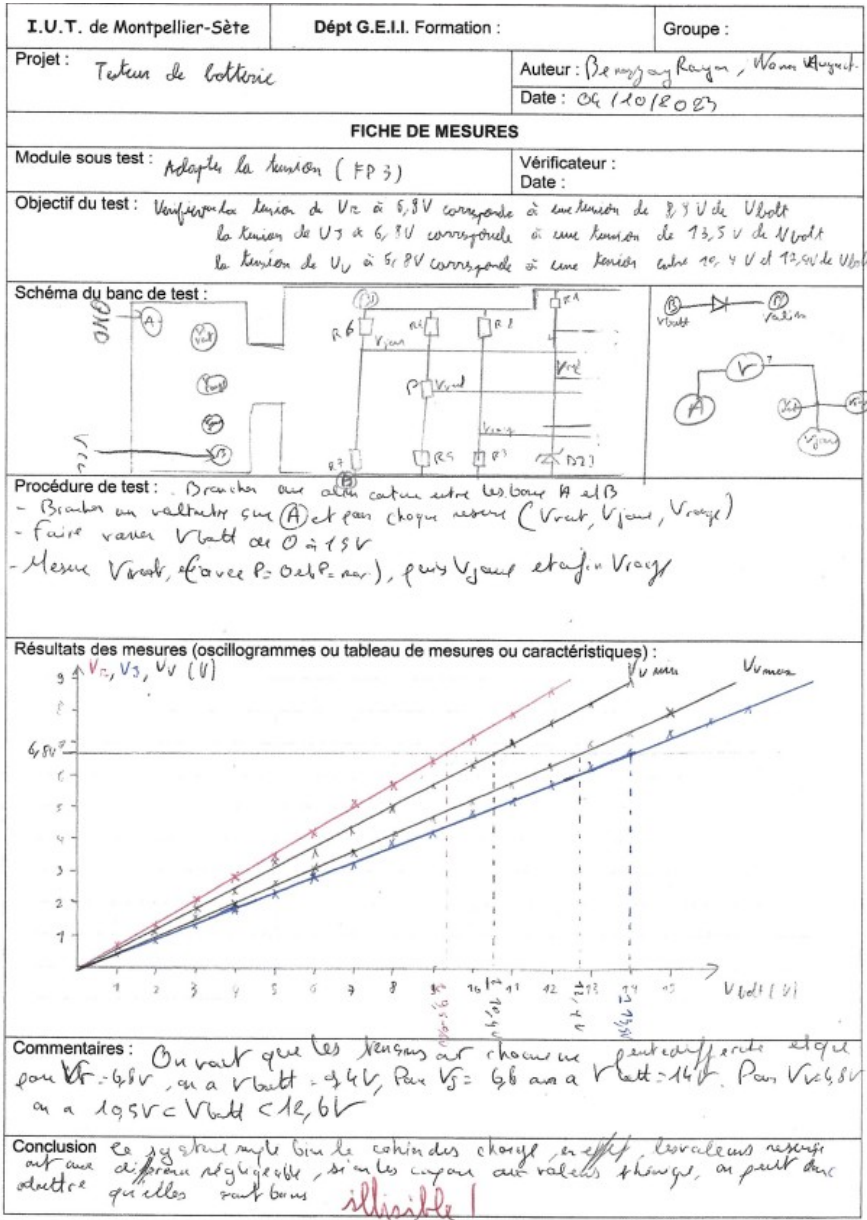
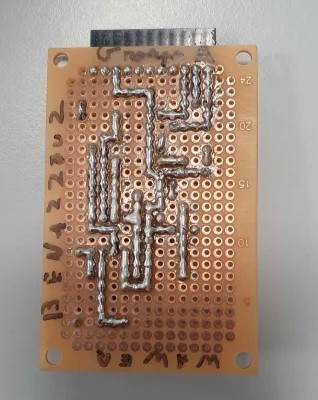
Schéma d’implantation et typon du testeur de batterie


Projet Dé électronique:
Le Dé électronique est un projet qui consiste en un circuit électrique numérique qui permet à l’utilisateur de simuler un lancé de Dé via l’appui d’un bouton sur la carte.
Découpage fonctionnel du dé électronique

Schéma fonctionnel du dé électronique
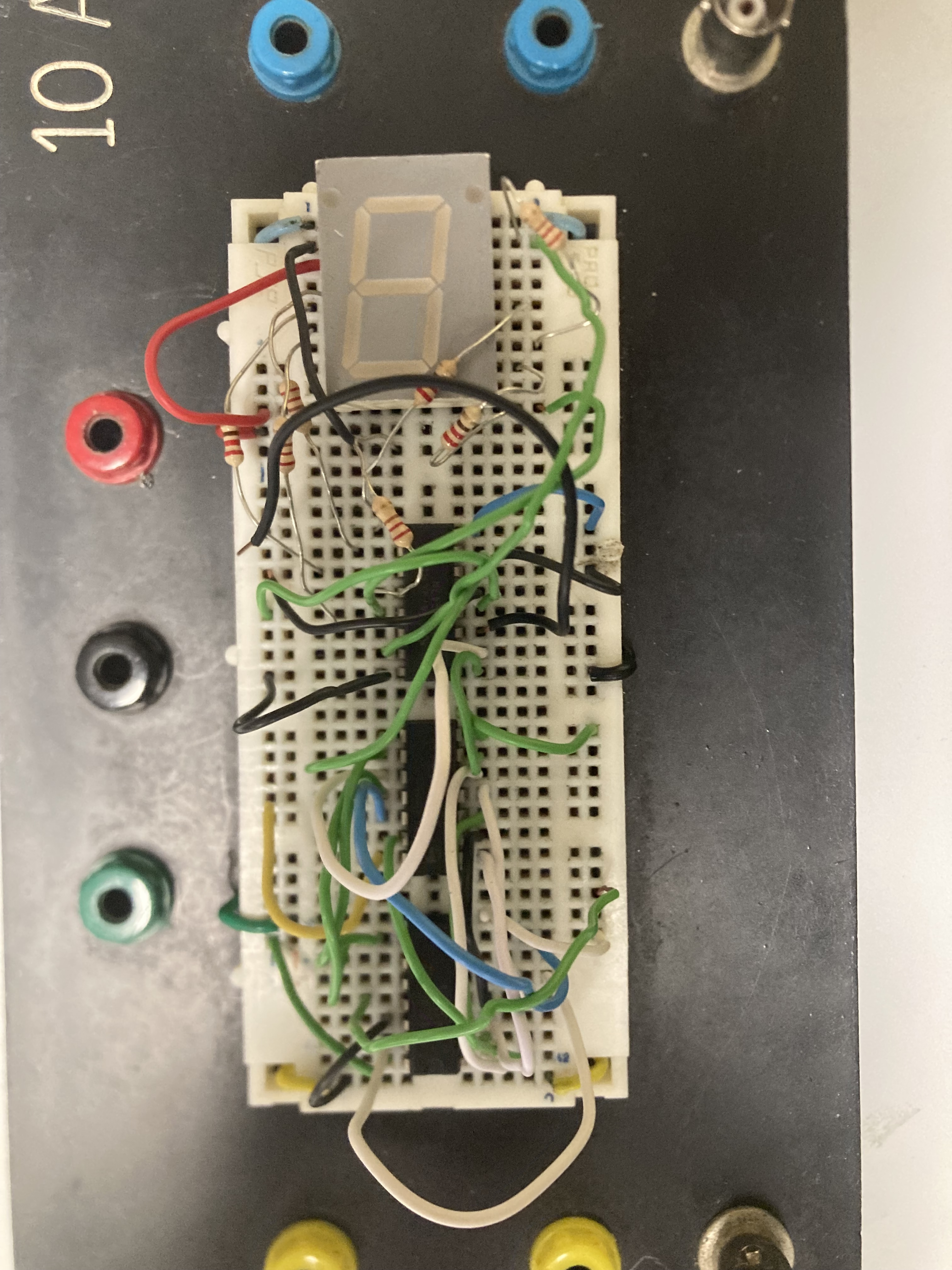
Prototypage du dé électronique
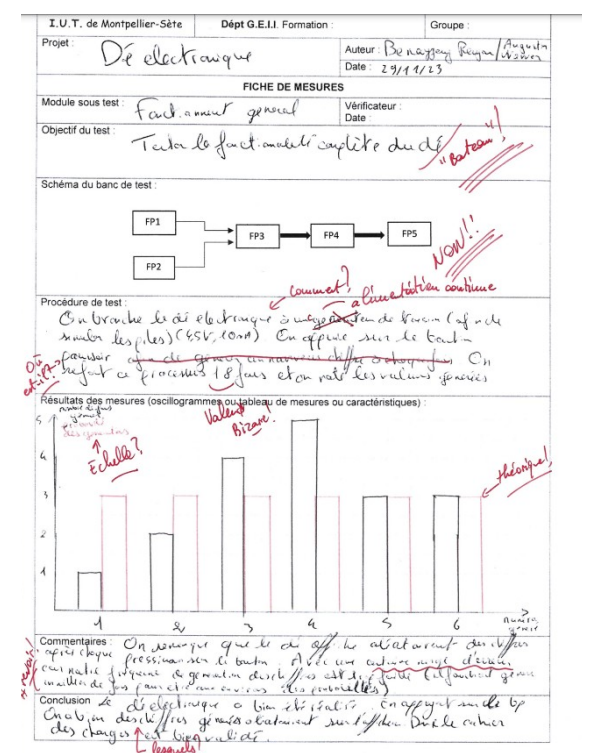
Exemple fiche de mesure du dé électronique
Procédure de fabrication / Nomenclature du dé électronique


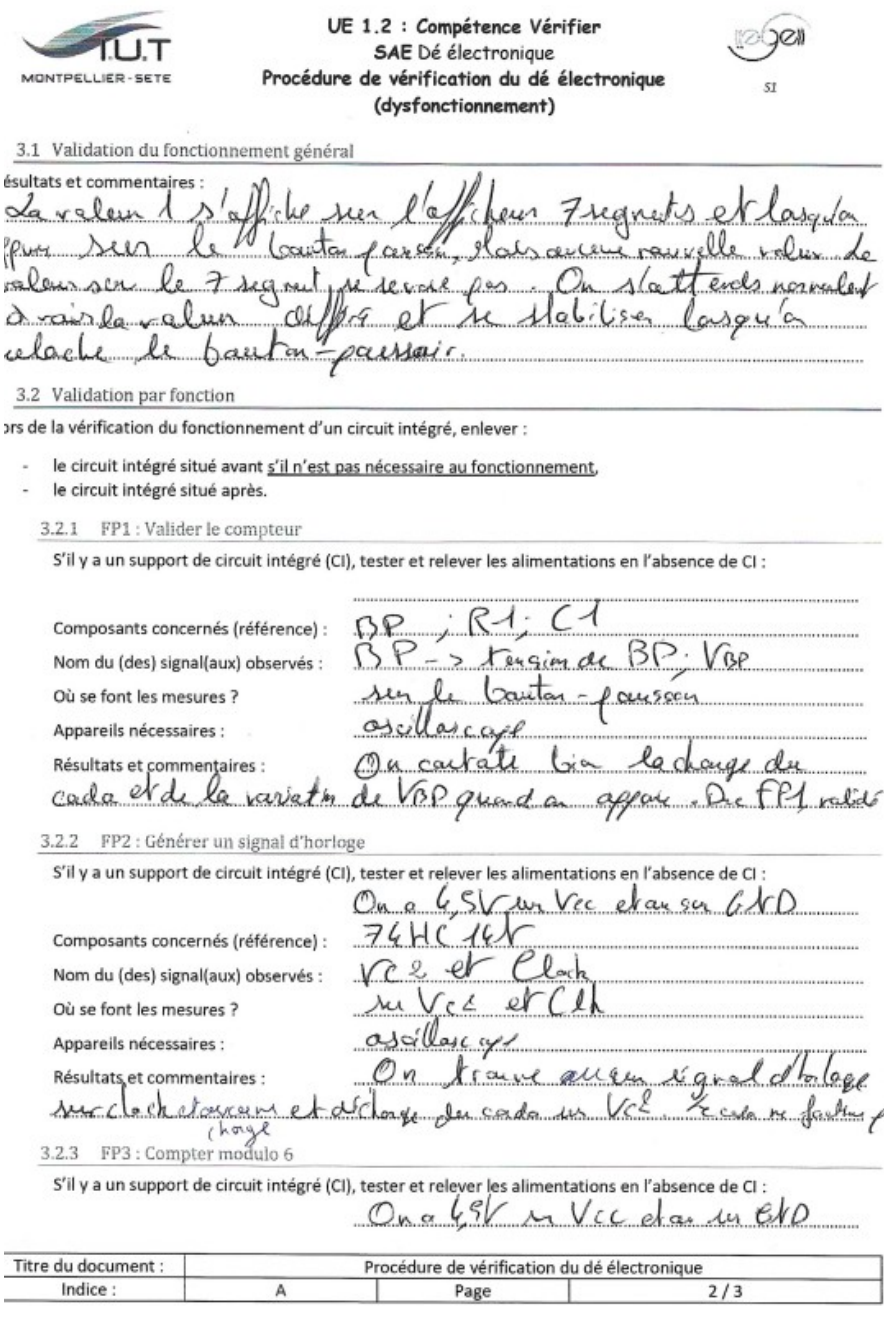
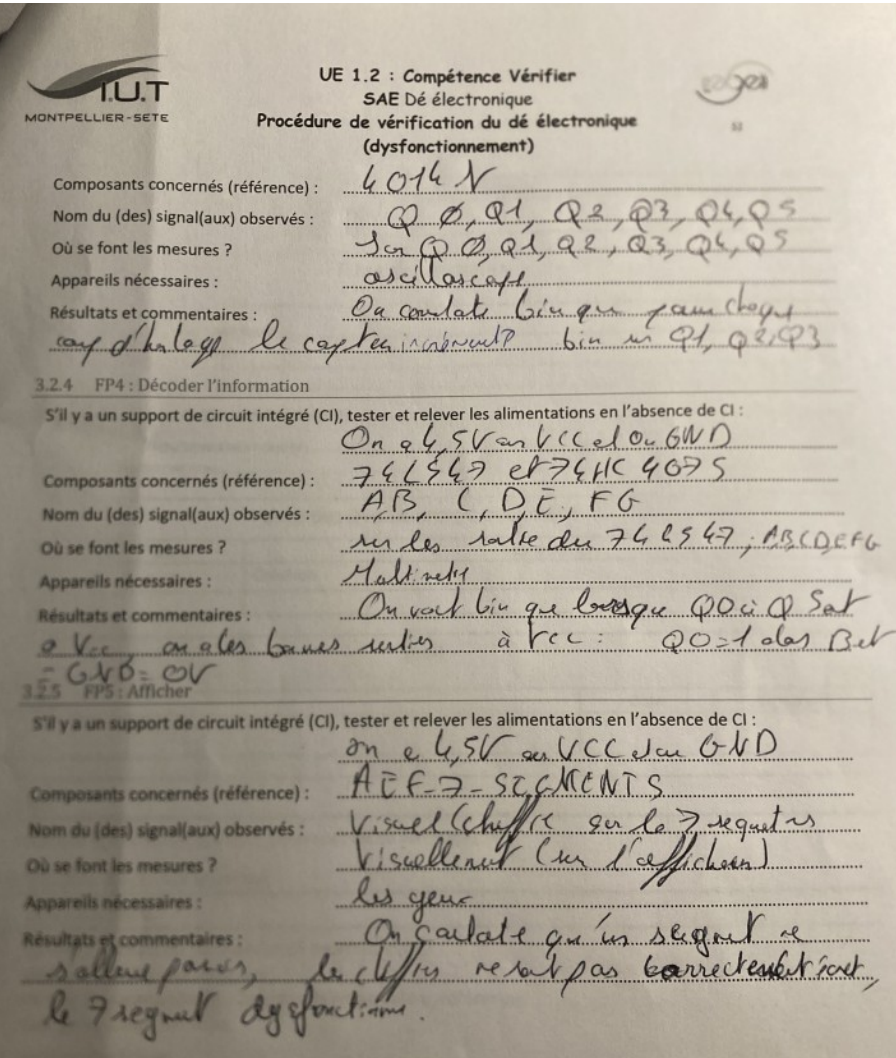
Procédure de vérification du dé électronique
Câblage domestique:
Le câblage domestique est une phase de mon apprentissage qui revient à découvrir les aspects élémentaires du câblage monophasé dans des habitations. Ce projet m’a fait comprendre la rigueur qu’il fallait avoir quand on travail avec des infrastructures électrique potentiellement dangereuse. J’ai également passé mon habilitation électrique et j’ai pris conscience du risque électrique et de l’obligation du respect des règles de sécurité. Enfin, j’ai découvert les différents éléments qui veillent à notre sécurité: disjoncteur, différentiel …
Schéma multifilaire du Garage / Couloir


Montage du Garage / Couloir

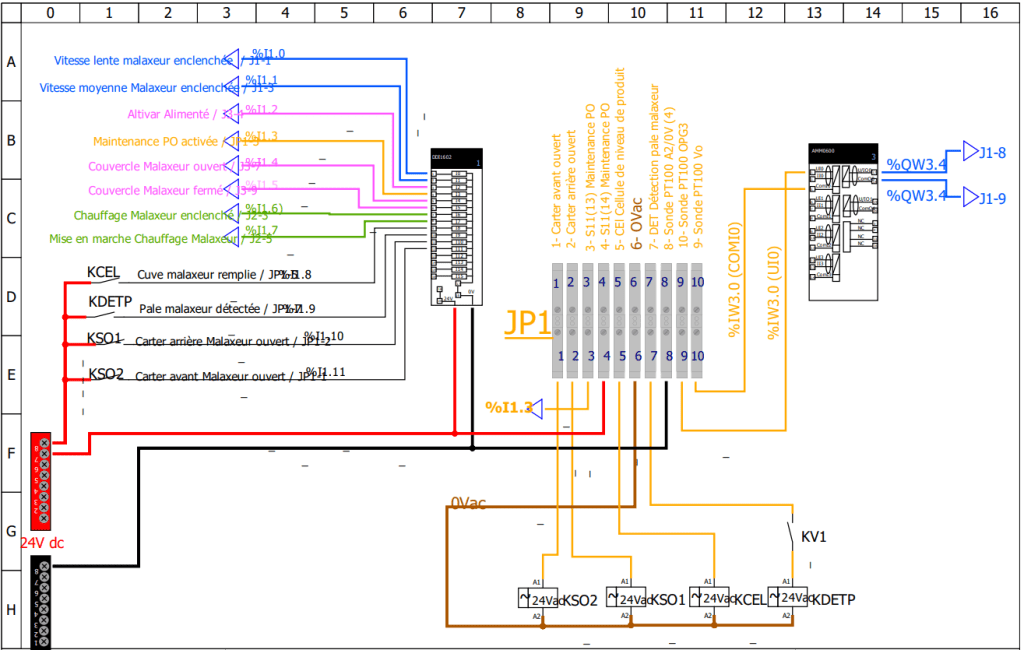
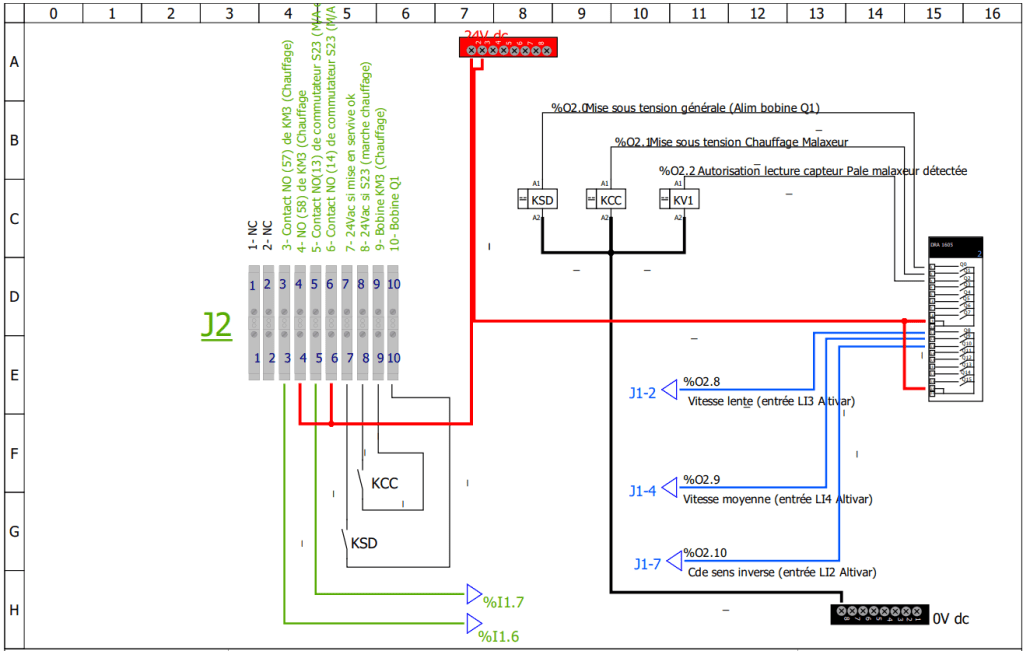
Projet Malaxeur Habilis:
Le malaxeur habilis fait suite au câblage domestique et rentre plus en profondeur en ce qui concerne le câblage d’éléments industriels et de sécurité électrique. Ce projet se décompose en 2 partie. Premièrement, la partie habilis qui m’a permis de passer mon habilitation électrique et de comprendre comment fonctionne la partie opérative du malaxeur. Deuxièmement, le malaxeur, qui est une machine industrielle simplifiée qui a pour but de malaxer des ingrédients et de gérer leurs température grâce à une partie GRAFCET sous le logiciel « contrôle expert ».


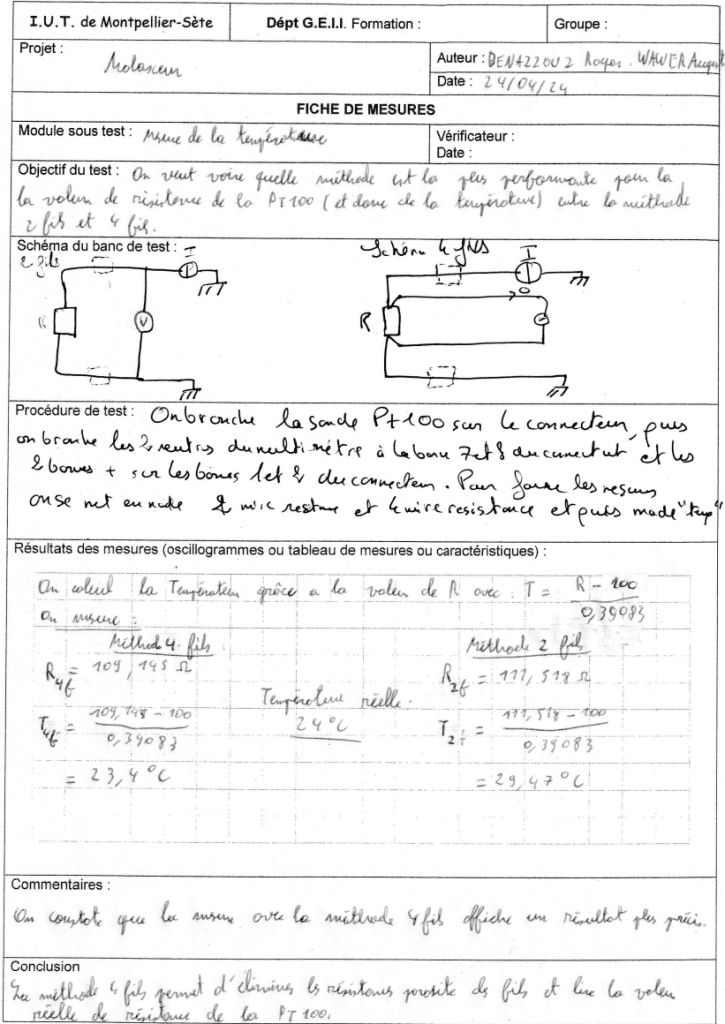
Exemple de fiche de mesure de la sonde PT100 du malaxeur
Projet Robot analogique:
Le robot analogique est un projet qui consiste à la création d’une carte de circuit imprimé qui permettra la commande du robot suiveur de ligne. Ce projet rempli toute les case de la compétence concevoir car il m’a demandé de réaliser de A à Z la carte de circuit imprimé, du découpage fonctionnel en passant par le prototypage jusqu’à la réalisation d’un produit fini.
Découpage fonctionnel du robot analogique
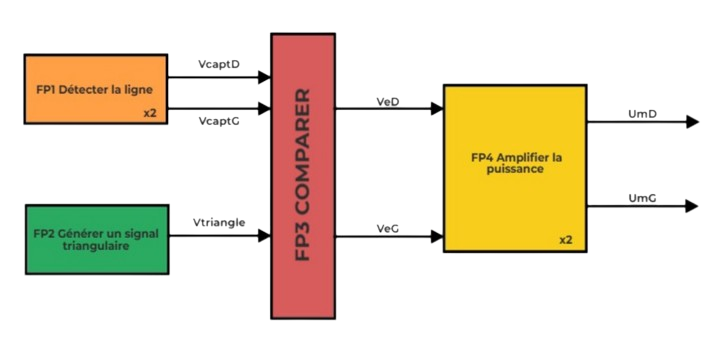
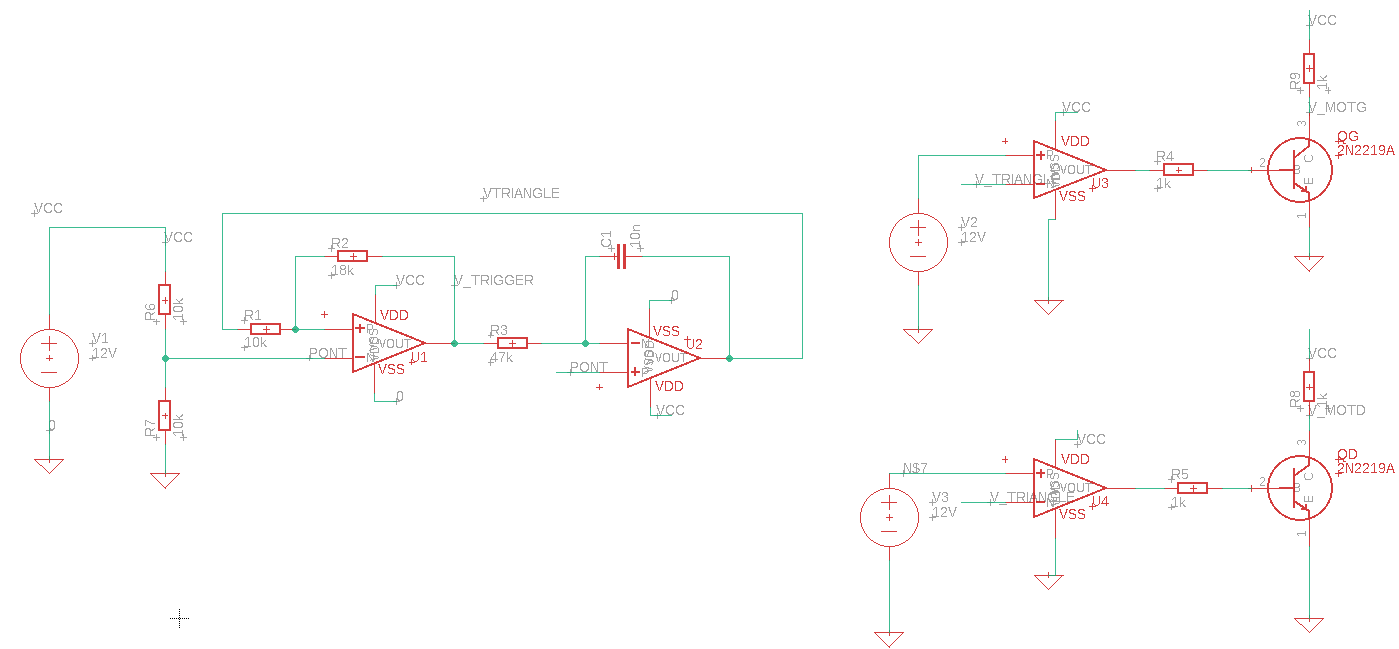
Schéma fonctionnel électrique du robot analogique
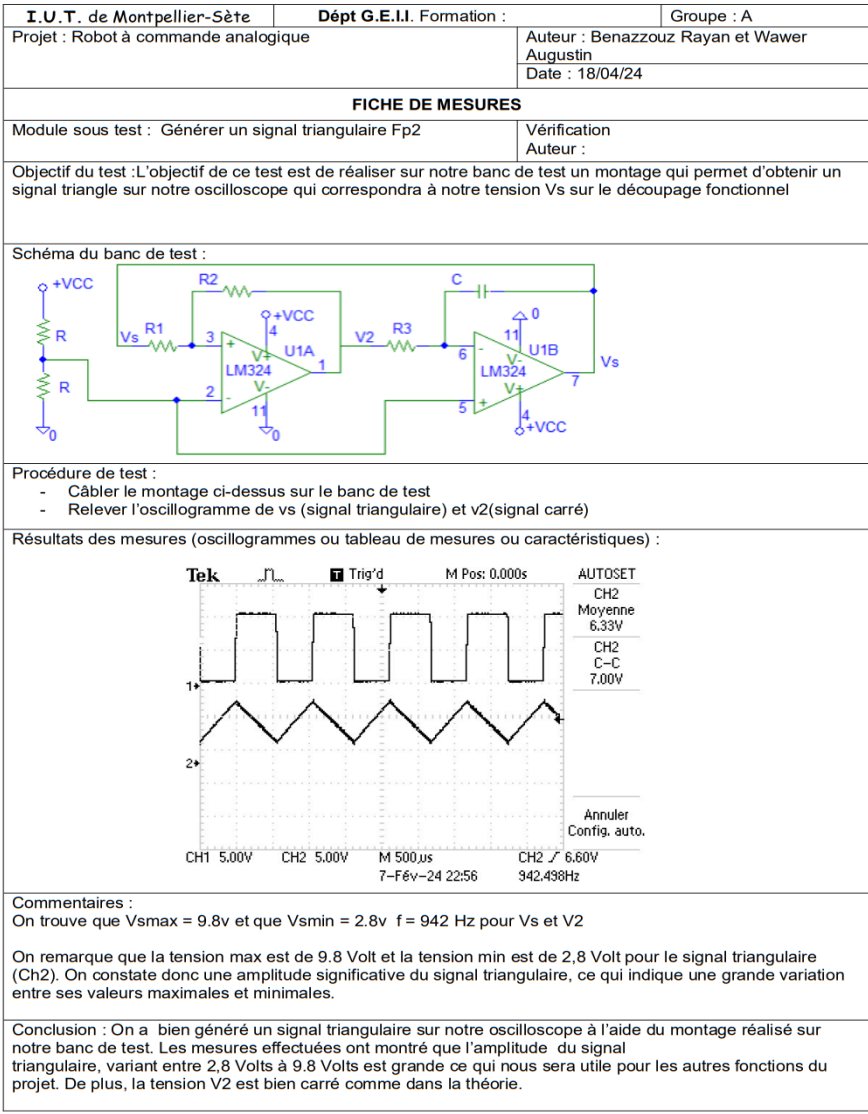
Exemple fiche de mesure du robot analogique
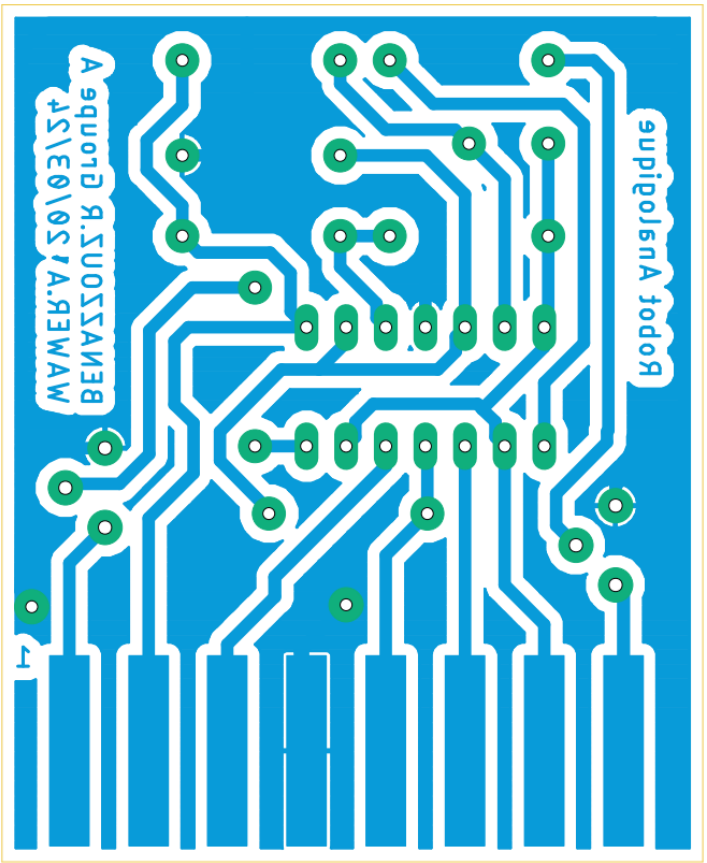
Typon du robot analogique
Projet Robot numérique:
Comme le robot analogique, le projet robot numérique se base sur le robot suiveur de ligne, mais, cette fois-ci, la commande se fera avec un microcontrôleur STM32. Ce projet se concentrera donc surtout sur le développement du programme du STM32 plutôt que sur la carte de circuit imprimé.
Projet Tracker:
Le projet tracker consiste à remettre en état un robot tracker de lumière déjà existant en analysant le dossier technique afin de retrouver les fonctions de celui-ci et de le faire fonctionner à l’aide d’un microcontrôleur STM32. Afin de faire les procédure d’essais plus facilement, une carte simulateur nous permet de simuler les entrées (Niveaux de lumière et capteurs de fin de course) et les sorties (Moteur pas à pas).
Découpage fonctionnel de la carte simulateur

Découpage fonctionnel de la carte tracker

Projet tutoré « Thermomètre analogique »:
Ce projet consiste à la réalisation en autonomie d’un thermomètre analogique qui est connectable à un microcontrôleur STM32 qui permet de lire la température sur un LCD.
Carte de prototypage du thermomètre analogique